图形学实验框架 Dandelion 始末(五):交互式几何编辑
原计划一口气写完《始末》这个系列,却在去年年初中断。写下这篇文章的时候已经是 2025 年,实在始料不及。这篇文章着重于 Dandelion “建模模式”背后的交互实现与数据同步机制,而不是几何算法,因为我认为前者是回忆录中更值得回顾的部分。
几何编辑的两个核心问题
到实现渲染模式和渲染器为止,Dandelion 已经是一个能够加载、管理和显示模型数据的小工具了。然而此前的所有功能(以及此后要实现的简单动画)基本上是重计算而轻交互、多流程而少状态的功能。用软光栅渲染器举个例子:它以几何数据 (Mesh)、变换信息、光源为输入,计算出每个像素的渲染结果。整个渲染过程按顶点处理、光栅化、片元处理、写入缓冲的流程执行,每一步读取上一步的输出,计算完成后写入自己的输出变量。虽然为了支持渲染,GUI 和物体数据中包含了一些状态,但这些状态在渲染过程中不会发生改变,整体的渲染流程全部是“前向”的,很容易被拆分成若干个互不影响的函数——也就是耦合度很低的函数。
就算法本身而言,几何处理算法与渲染流程也是类似的。但为了引入交互式的几何编辑功能,必须实现三维的交互操作和对应的可视化反馈,而 GUI 库对这些功能没有任何支持,这是第一个问题。对于渲染而言,“有状态”的变量最多只是变换、材质和光源,而对于几何编辑而言,“有状态”的变量是所有的几何数据,是图元级别而非物体级别的数据。图元数据不仅数量上非常庞大,还在内存和显存两个位置各有一份副本,所以任何修改首先需要从 UI/UX 层面同步到内存数据,再从内存同步到显存数据,这是第二个问题。
从功能角度,我们的参考对象 Scotty3D 把这两个问题都解决得不错:
- 允许操作者拾取(pick,三维交互方面常用这个词代替“选中”)物体、三角形、边、顶点等多种不同粒度的元素,选中后既有高亮的视觉反馈,也能对所选元素进行各种操作;
- 将几何编辑操作划分为“局部操作”与“全局操作”两类,分别对应只影响几个图元的操作与影响整个物体的操作,并分别实现了内存-显存同步机制,保证编辑后能正确重绘画面。
所以 Dandelion 继承了 Scotty3D 的许多交互设计,以及区分对待几何编辑操作的思想。
然而,Scotty3D 也有些不尽如人意的地方,其中最成问题的就是性能不佳。在我本科尚未毕业时,我用的还是一台装有 i5 8250U 和 GeForce 940MX 的轻薄本(2018 年产,实际 GPU 性能已经远逊于当代的集成显卡),加载一个几千面的模型并进入编辑模式后,帧数从 60 骤降到 35 左右;而如果加载著名的 Stanford Dragon 模型(约 30 万面),进入编辑模式后甚至达不到 3 帧!2022 年秋季学期上课的同学中,有不少人的笔记本性能甚至更差,以至于验收都无法正常进行。这使我决定从头重新实现所有的交互操作、视觉反馈和数据同步。
半边网格数据结构
在谈实现之前,还是要简单讲讲这个对几何编辑非常重要的数据结构。半边网格 (Halfedge Mesh),是高效查改 Mesh 的一种辅助数据结构。这里我不多谈它的设计和实现,以免长篇大论。不过有个问题是避不开的:为什么几何编辑需要这种数据结构?
因为常规的 Mesh 存储不能满足几何操作的要求。最常用的 Mesh 数据结构大体上是顶点数组+顶点索引的模式,顶点数组维护属性、顶点索引维护图元。这种存储方式不直接反映任何拓扑上的邻接关系,而各种邻接关系正是几何操作频繁使用的。大多数几何操作的思想继承自微分几何学,遍历各种“邻域”——比如顶点邻域、边邻域——是在 Mesh 上近似微分操作的主要手段,而顶点索引不能为这种操作提供任何便利,所以我们还需要加速结构。
Dandelion 的半边网格 HalfedgeMesh 大量参考了 Scotty3D 的代码,这里再次感谢 CMU 老师和助教们无私的开源贡献。但为了让编写和使用更简洁,我还是在底层更换了不少东西。半边网格是包含大量指针的数据结构,首先要用链表组织半边、顶点、边、面片四种基本图元,然后再用指针维护四种图元之间的邻接关系。Scotty3D 直接使用 std::list 实现双链表,省去了自己实现的麻烦。但 std::list 是非侵入式链表,数据类型不是节点类型,且并没有对外暴露节点类型。偏偏半边网格需要在数据类型内增加节点类型的指针(比如顶点 Vertex 类型内要有指向某个半边的指针),以此提供遍历邻域的能力。最终 Scotty3D 选择全部用迭代器实现指针,并大量定义了 Ref 和 CRef 为后缀的类型别名(比如 using VertexRef = list<Vertex>::iterator)。诚然,迭代器的性能开销不算大,但到处都是的 Ref 类型还是容易让初学者感到迷惑。所以最终我选择全部改用指针实现,包括自己实现侵入式链表(utils/linked_list.hpp 中的 LinkedListNode<T> 和 LinkedList<T>)、所有图元类型的引用关系全部表示为裸指针。在与指针战斗了不知道多少天之后,这一修改还给 Dandelion 带来了一个副产品:指针类型与引用类型的项目内规范。
简单来说包括这么几条:
- 裸指针
T*表示引用关系,但不表示所有权。换言之,指针T* x的持有者不考虑x的分配和释放问题。- 引用类型
T&用于传递参数和返回结果。换言之,引用类型是临时的,表示可以临时访问或者修改某个对象。- 智能指针
unique_ptr和shared_ptr管理所有权,unique_ptr<T> x的持有者负责分配和释放x。如果需要传参,先转成引用;如果新构造的对象需要保存x的引用关系,先转成裸指针。
引入半边网格有些类似向数据库中加入索引(通常是 B+ 树),能让很多操作执行加快,但也在输入(操作)和底层数据之间增加了一层,需要时时小心确保加速结构和底层数据之间是一致的,增加了很多同步问题。除了接下来要聊的同步方案,Dandelion 还采用一条很激进的策略,那就是只允许编辑单个物体、只保留一个半边网格,一旦退出建模模式,附属于 Scene 对象的 HalfedgeMesh 马上销毁。
交互:多粒度拾取与内存-显存同步
任何编辑操作的过程都可以简单概括为选中、修改、同步、重绘这几步,而在三维空间中,第一个问题就是如何“选中”。通过光标在屏幕上选择三维实体的操作通称“拾取” (picking),负责把二维的屏幕坐标(点击或者拖动的位置)转换到三维空间,并判断这个坐标在哪个可选中的对象上。形式化一下,拾取操作代表一个将 映射到某个有限集合的函数
对渲染稍有印象的朋友很容易联想到光线追踪:如果把观察相机的位置 作为原点,窗口视作三维空间中的一个矩形,那么点击的位置可以在矩形上确定一点 ,这两个点就能确定一条射线。而这条射线类似我们的视线,它打到哪里,就代表我们看到(点击)了哪里,也就代表了我们的选择操作。相应的代码实现和光线追踪完全一样,可以直接用之前写好的射线求交功能。
不过对于光线追踪而言,射线求交要获取的是坐标、法线和材质;对编辑操作而言,求交要获取的则是图元和物体。如果要拖曳一个顶点,那就要选中顶点;如果要拉伸一条边,那就要选中边,等等。
然而在三维场景中,真实存在的几何数据只有面片,射线也只能和面片求交。连求交都无法实现,如何才能选中其他类型的图元呢?Scotty3D 的做法是进入建模模式后临时增加大量的 Mesh:
- 每个顶点处增加一个小球
- 每条边上增加一个圆柱
- 每条半边上增加一个箭头(也就是一个圆柱+一个圆锥)
有了 Mesh,这些图元也就都可以用求交选中了。这个思路说起来很简洁,但制造了巨大的性能问题,堪称是一个力大砖飞的解决方案。例如一个立方体有 24 条半边、8 个顶点、18 条边和 12 个三角形面,假如每个小球、圆柱和箭头各有 20 个面,
- 在布局模式下,只需要渲染 12 个三角形面;
- 在建模模式下,需要渲染足足 1012 个三角形面。
大致估算 个三角形面的 Mesh 有多少图元时,一般按顶点数 、边数 计算,那么半边有 条,那么建模模式下就需要额外渲染 的面片😱无怪乎加载了五千面的模型后,Scotty3D 帧数会大幅下降——毕竟此时场景中已经有大约五十万面片(两万五千个辅助图元)了,对 940MX 这样的低端显卡来说负担绝对不轻。更加可怕的是,求交操作必须有真实的几何数据才能完成,也就是场景中真的存在两万多个小球、圆柱或箭头的副本,而不是利用 实例化绘制 (Instantiated Draw) 技术渲染出来的“假象”。如此巨大的 Draw Call 和光栅化开销,我是绝对无法接受的。
上面的估算是基于一个理想均匀 Mesh 假设:所有顶点的度(相邻的面片数)都是 6,因此每个顶点被 6 个面共享、每条边被 2 个面共享。折算一下,每个面占有 个顶点、 条边。
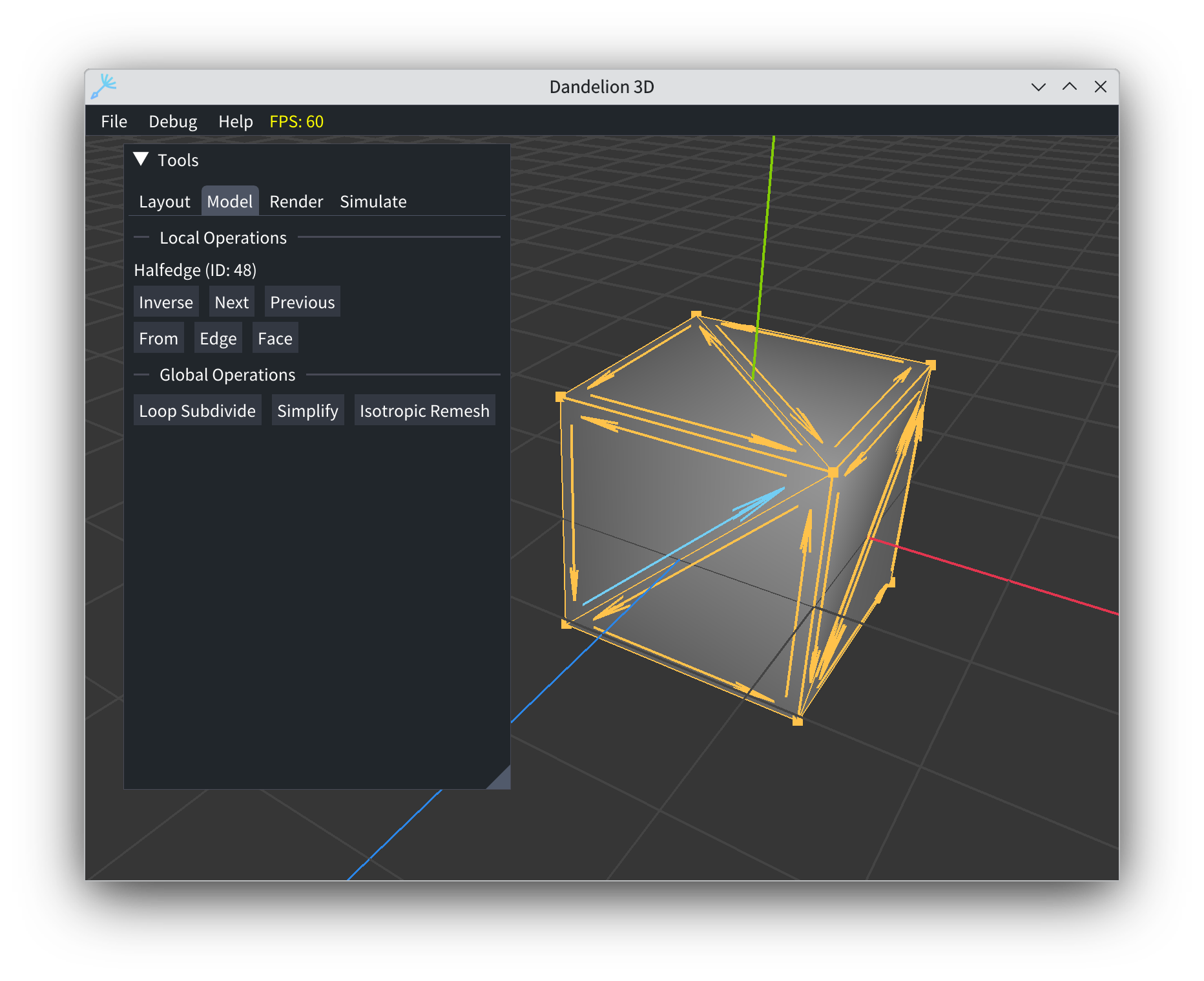
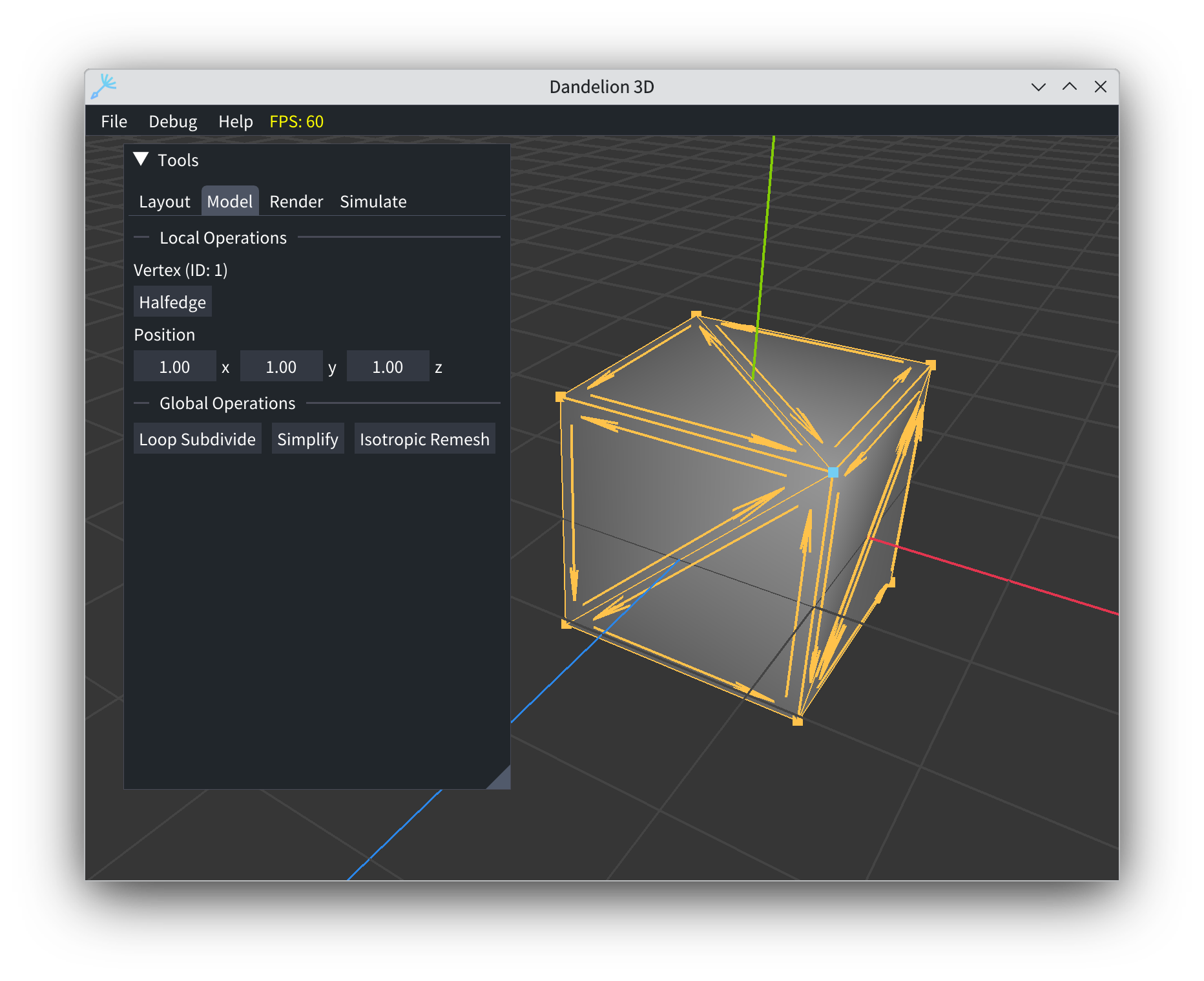
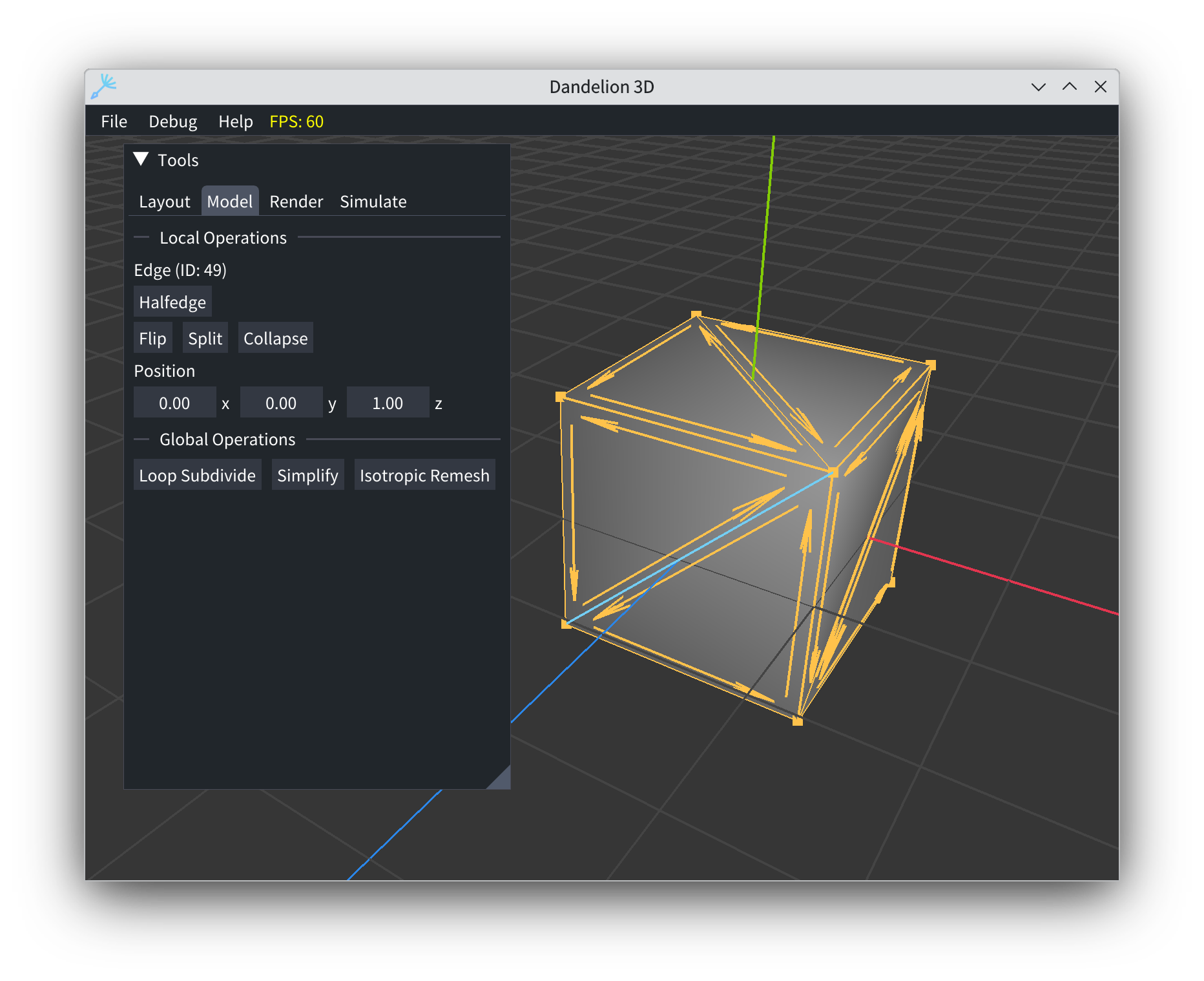
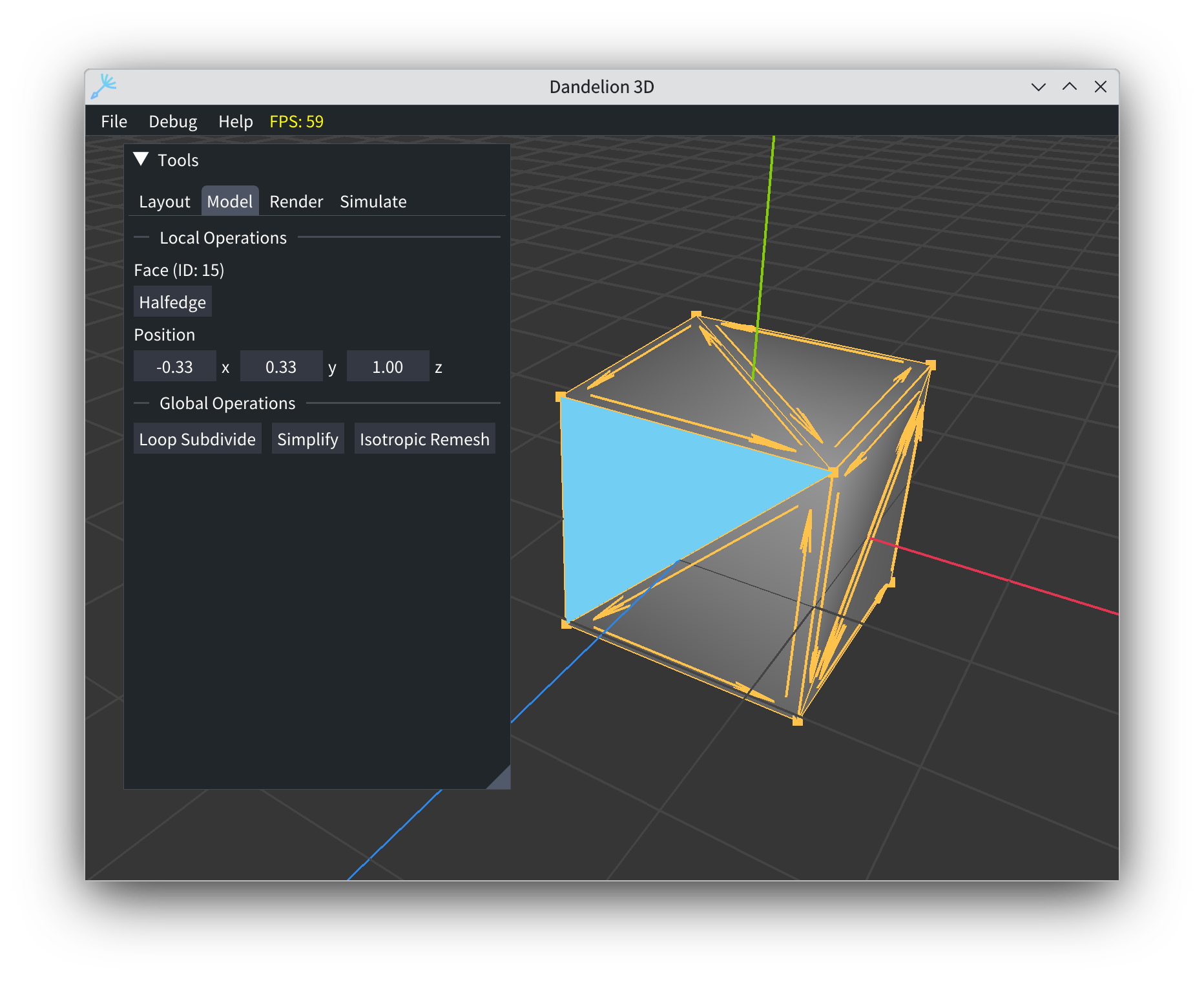
于是我放弃了给每个图元增加 Mesh 的做法,转向另一种比较取巧的思路:能否只和面片求交就判断出使用者想选中的是什么图元呢?顶点和边都是没有体积的,但从使用者的意图角度看,点击面片的边缘可以代表拾取边、点击角可以代表拾取顶点。由于射线求交的返回结果中包含重心坐标,判断相交的位置在不在边缘或顶角上相当容易。获取到重心坐标后,Dandelion 会按如下顺序判断被拾取的是哪种图元:
- 射线打中靠近顶角的位置(蓝色区域)时代表顶点;
- 打中比较靠近边界的位置(深绿色区域)时代表半边;
- 打中靠近边界的位置(浅绿色区域)时代表边;
- 打中中间位置(白色区域)时代表面片。

借助这种间接选择的方法,无论要拾取的是哪种图元,射线都只需要与面片求交一次,其他图元则不必增加实际存在的 Mesh,也就不必面对 Scotty3D 那样巨大的开销了。
现在我有了拾取操作的实现方案,不过距离真正实现还差一些技术细节。这些细节包括 UI 层面的拾取状态管理,以及 UI→Halfedge Mesh→Mesh→VRAM Buffer 的整个同步过程。
在不同的模式下,可以被拾取的对象包括物体和各种图元,而可以被选中的对象还包括光源。再加上“什么都没有选中”的情况,选择/拾取操作可能的状态会有很多种。加上建模模式下的拾取操作与其他模式不一样,完整的选择/拾取操作逻辑是比较复杂的。整理过后,我给出的实现方案是:
- 用
Controller::on_picking作为统一入口,响应鼠标点击、生成拾取射线,并根据当前的模式决定转到pick_object还是pick_element Controller::pick_object与Controller::pick_element的逻辑很相似,都是先求交然后根据交点判断是否执行拾取,再调用selectController::select将直观的“拾取”转换为实际的“选择”,会根据要选择的对象类型调用select_object/select_halfedge/select_vertex等不同的函数,最终修改Controller::selected_element
如果只考虑之前的求交、拾取逻辑,select 与那一大堆 select_ 前缀的函数似乎都有些多余,让这个实现显得很复杂。它们的实际作用也的确不是处理空间上的拾取逻辑,而是更新拾取后的渲染数据,让被选的对象高亮显示。由于实时渲染要先设置数据和状态才能更新画面,我甚至还要再增加一个 unselect 函数,专门负责清理与之前被选对象关联的状态,以免多出一些不该有的高亮来。
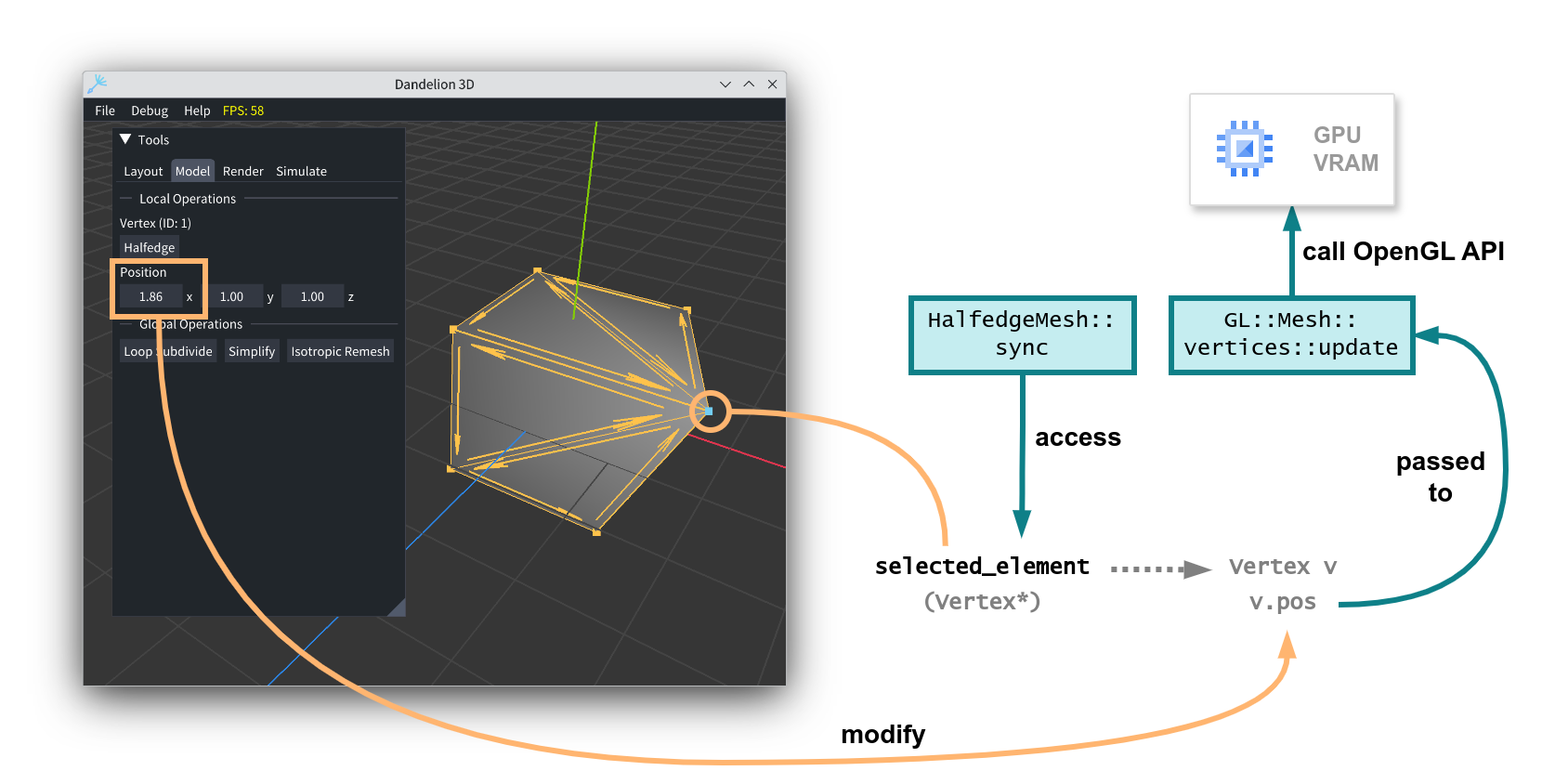
完成这些部分之后,选择状态就保存在了 Controller::selected_element 这个属性中。它是一个 SelectableType 类型的变量,而 SelectableType 则是所有可选中类型的联合:
using SelectableType =
std::variant<std::monostate, Object*, const Halfedge*, Vertex*, Edge*, Face*, Light*>;当使用者拾取了一个顶点后,select 方法就会更新 selected_element 属性,并附带更新 HalfedgeMesh::inconsistent_element——这代表半边网格上此顶点的信息需要逐帧同步到 GL::Mesh::vertices 中对应的顶点。当使用者通过 toolbar 上的滑动条改变顶点坐标时,Scene::render 方法就会调用 HalfedgeMesh::sync 方法,在渲染画面前完成 HalfedgeMesh→GL::Mesh 的同步(包括内存和显存)。
不得不说,我在写这部分代码之前,从来没有如此频繁地使用过 std::variant、std::visit 和各种各样的 lambda 表达式。甚至还因为与静态变量、静态 lambda 表达式相关的一些生命周期问题,度过了若干苦苦调试的白天——因为那段时间持续无休工作,夜晚早就完全没精神了。
上面谈到的只是局部形变的同步方式,仅适用于单个顶点/边/面片的修改。对于各种改变拓扑的局部操作,以及 Mesh 细分、简化之类的全局操作,Dandelion 会执行全局同步。全局同步由
HalfedgeMesh::global_inconsistent标记触发,会彻底重写GL::Mesh的所有数据。这种同步方式比较常规,这里就简单带过。
渲染:辅助图元与视觉反馈
刚才说图元拾取的时候,我提到
无论要拾取的是哪种图元,射线都只需要与面片求交一次,其他图元则不必增加实际存在的 Mesh
然而尽管无需使用大量的 Mesh,半边、顶点这些图元还是要渲染出来的。而且,如果某个图元被选中了,那么还有必要用另一种颜色高亮显示,提供最基本的视觉反馈。
既然不必用实际存在的 Mesh 来表示图元,那为了降低渲染开销,我就要搬出实时渲染第一要诀了:近似一下,能看就行。所以在 Dandelion 中,
- 顶点是用
GL_POINT渲染的,通过增大 point size 来避免太小看不见的问题; - 同理,边是用
GL_LINES渲染的,调大了 line width; - 半边的箭头呢?其实它不是真的箭头,而是五条线段伪装出来的。用重心坐标控制作为轴的线段保持在离边很近但又不重叠的位置,再用相对于轴的坐标来添上四条短线段。所有的坐标(长度和位置)都是相对的,无论面片大小都不会出错。
这样一来,绘制辅助图元所需的数据量比 Scotty3D 少了一个量级;而无需几何求交意味着同类的辅助图元可以被并入一个 Draw Call,每帧也只需要增加三个而不是成千上万个 Draw Call。从算法的角度去评估,这大概算不上什么优化,称为取舍——效果和性能之间的取舍——也许更合适。不过这个取舍带来了极明显的性能提升:在两年的教学中,实时渲染性能不再是完成实验的瓶颈,我们再也没有遇到过同学的电脑跑不动实验的事情,这足以让我满意了。
为了尽可能加快渲染,除了面片以外的所有图元都是没有着色计算的,直接使用全局统一的颜色,不存在顶点色和存储顶点颜色的 Buffer。如果我要让选中的图元渲染为蓝色🔵,而其他图元都维持黄色🟡,那么我就不得不在选中时从 Buffer 中删去这个图元,然后在取消选择时把它加回去。对一个很长很长(可能有几万、几十万)图元的 Buffer(相当于数组)做随机删除的代价太大了,这不好。不过我们需要的是高亮效果,只要能看到就可以。那么只要先渲染所有图元,再把被选中的图元复制出来单独渲染盖上去就好了。Controller 类有一个 GL::Mesh 成员 highlighted_element 专门用来存放复制出来的图元,每一帧绘制完其他所有图元之后,会关闭深度测试再把它叠加绘制上去。
如果这种做法继续推广,就得到了分层 (layer) 的渲染策略。比如场景内的物体属于视图层,这种特殊的高亮属于 UI 层,通过 Draw Call 排序实现不同层按顺序叠加。现在 Dandelion 还没有那么多样的渲染需求,所以也没有作正式的分层和 Draw Call 重排处理。不过这是 2.0 版本重要的优化特性之一,期待能早日实现。
下回分解
讲到这里,Dandelion 的搭建工作已经进行了 80%。最后的一部分工作是添加物理动画,但我对此的了解实在少得可怜,虽然在 SiyuanLuo 学弟的帮助下完成了一些简单的模拟,但也还是没有多少值得一提的东西。有的朋友可能还是对这篇文章没有提及几何处理算法感到奇怪,那是因为相比于在框架上实现算法,我更想回忆的是尝试实现交互式编辑的经历。毕竟我所实现的算法都十分经典,又有 Scotty3D 的文档(虽然这部分没有源码)可供参考,一写不好就显得寡淡。
下一篇文章我会简单聊聊 Dandelion 现有的物理动画,之后就是这个系列的尾声——也是我四年助教生涯的尾声了,我想谈谈自己为什么选择做助教、为什么选择做课改,以及四年间对交大计算机本科教学的一些思考。